Роботы - сортировщики мусора
Опубликовано Редактор 18-12-2019 (11846 прочтений)На ручной сортировке мусора по всему миру работает огромное количество людей. По скромным подсчетам этой неприятной и трудной работой занято свыше 60 тыс. человек. Роботизирование ручной сортировки мусора стало очевидной задачей для инженеров. Им приходится решать ряд задач при разработке роботов-сортировщиков:
- Робот должен быть достаточно проворен. Это механическая задача.
- Робот должен хорошо видеть. Это задача оптики и электроники.
- Робот должен быть умным. Это задача электроники и программирования.
- Робот должен быть очень сообразительным. Эта задача решается с помощью нейро-сетей.
Как робот определяет тип отходов
Точность определения материалов зависит от степени обучения искусственного интеллекта (ИИ). Система запоминает штрих-коды, внешний вид предметов, цвет и отраженный спектр. Скорость распознавания и количество распознаваемых материалов зависит от производительности нейросети (Neural network).
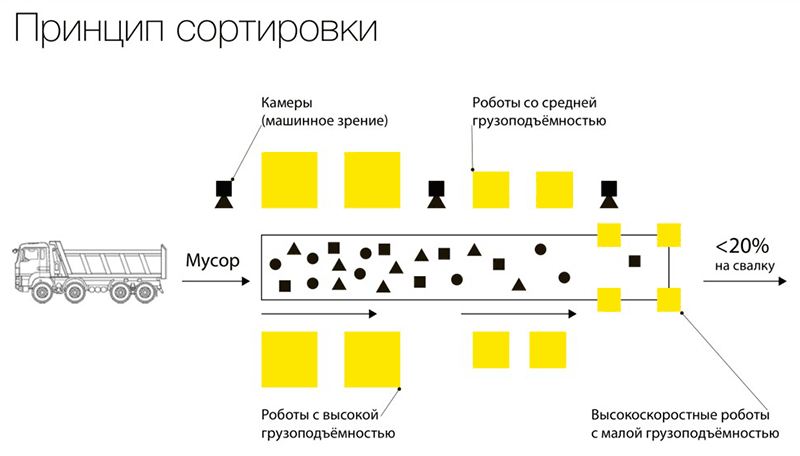
Процесс напоминает оптическую сортировку мусора, но подход к решению задачи несколько иной. Машинное зрение может обрабатывать данные по различным показателям одновременно благодаря использованию высокопроизводительных нейросетей. Не обязательно определять тип материала по отражённому спектру. В основном предметы оцениваются по внешнему виду, также как это делает рабочий-сортировшик на конвейере.
Большая часть программного обеспечения для разработки и обучения ИИ находится в открытом доступе, например, на GitHub. Им пользуются зарубежные компании, например, канадская Waste Robotics и финская ZenRobotics.
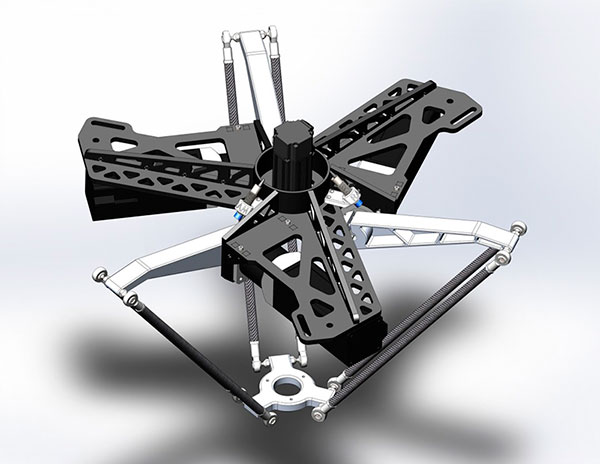
Механическая часть робота-сортировщика
В качестве манипуляторов используются традиционные шарнирные, с направляющими, а также относительно новые конструкции с параллельной кинематикой.
Роботы с параллельной кинематикой обладают исключительной быстротой и точность. Это определило их широкую популярность в настоящее время.
Российские разработки роботов-сортировщиков
В петербургском Планетарии №1 при поддержке Фонда содействия инновациям занимаются разработкой проекта "NeuroRecycе" под руководством Евгения Гудова. Робототехнический проект вырос на базе некоммерческого коворкинга YotaLab.
Робот-трипод должен совершать одну операцию в секунду и перемещать до 10 кг груза с точностью до 0,1 мм. Для выполнения этой задачи задействован искусственный интеллект и точная робототехника. Сейчас нейросеть определяет 10-20% объектов, а в перспективе – до 70%.
В NeuroRecycle используются готовые решения YOLO и TensorFlow. К продаже версия должна быть готова к концу 2020 года. Разработчики рассчитывают, что их робот будет дешевле зарубежных аналогов в 5 раз (испанские роботы стоят около 32 миллионов).
ООО "Лаборатория машинного обучения" также разрабатывает систему сортировки мусора на базе нейросетей. Проект получил государственную поддержку через систему грантов Национальной технологической инициативы. Нейронет стал одним из основных направлений разработки и реализации данной комплексной программы. На стадии программирования партнерами Лаборатории были коллеги из Зеленоградского инновационно-технологического центра и специалисты Московского института электронной техники.
В московском АО Экотех (ГК "Экологические и энергетические технологии") разработали опытно-промышленный образец. Система распознавания робота построена на базе гиперспектральной (NIR) сканирующей камеры. Она различает практически все находящиеся на движущейся ленте конвейера предметы, размерами более 7 кв.см на скорости до 3 м/c. В частности, система распознает до 20 видов пластмасс по их химическому составу и цвету в процессе движения отходов по ленте конвейера. В качестве манипулятора используется трипод FESTO.
В новосибирском Институте теплофизики СО РАНН разрабатывают автоматизированную систему сортировки мусора с использованием ИИ. Ученые получили федеральный целевой грант в 60 миллионов рублей.
Алексей Масленников
Использованные материалы
- Как в петербургском Планетарии №1 разрабатывают первого в России робота, сортирующего отходы
- Новосибирские ученые получили грант 60 млн руб. на разработку технологии сортировки мусора
- Как искусственный интеллект помогает перерабатывать отходы
- Роботизация: Российский робот для сортировки отходов создан в Экотех

